 2017, Vol. 43
2017, Vol. 43文章信息
- 孙晓永, 张琦, 潘孟春, 陈棣湘, 翁飞兵, 万成彪
- SUN Xiaoyong, ZHANG Qi, PAN Mengchun, CHEN Dixiang, WENG Feibing, WAN Chengbiao
- 基于COMSOL Multiphysics的目标磁特性仿真分析
- Simulation analysis of the magnetic properties based on COMSOL Multiphysics
- 中国测试, 2017, 43(1): 122-126
- CHINA MEASUREMENT & TEST, 2017, 43(1): 122-126
- http://dx.doi.org/10.11857/j.issn.1674-5124.2017.01.025
-
文章历史
- 收稿日期: 2016-06-13
- 收到修改稿日期: 2016-08-13




潜艇是现代海军隐蔽性最强的装备体系,以广阔海洋为掩护的潜艇广泛应用于战场后,已成为现代战争中,对世界各国军舰队和水上船只极具威胁的突袭手段[1]。而及时有效地发现敌方潜艇是建立反潜作战系统的先决条件之一,也是在战争中取得优势地位的关键所在[2]。由于潜艇为铁磁性物体,会对地磁场环境产生异常,故可以采用磁异常探测技术对潜艇进行目标探测和定位识别;并且合理的磁场异常探测技术可以提高探测的精度、效率以及准确度[3]。
目前国内外经常使用的方法是在飞行载体平台上安装基于总量的磁传感器来对其探测范围内的海域进行探测,通过磁异信号来发现潜艇。探测原理是利用潜艇的磁场信号,对潜艇进行准确定位,并依此解算出目标潜艇的运动要素,及其与飞机的相对位置等参数[4]。但是由于磁异常探测研究中的主要目标为潜艇和飞机,开展实物实验成本较大,国内经常采用模拟仿真方法对潜艇磁场进行计算。文献[5]提出用电极模拟潜艇磁场对抗航空磁探的方法,但是要产生潜艇量级的磁矩需要采用超导技术,考虑磁场模拟装置可能会放在水下,实用性较差。文献[6]提出了用空心永磁体球来模拟潜艇磁场的方法,并估算出了模拟体的物理及几何参数。由于飞机结构复杂、难以等效、难以理论计算,为了更好地研究潜艇模型的磁场分布和磁场特性,本文采用有限元软件COMSOL对单潜艇模型以及探测飞行模型分别进行磁场仿真,研究基于该仿真方法下的潜艇磁场分布特性。
1 铁质空心球体的磁场分布 1.1 空心球体磁场的理论计算文献[7]提出了一种计算具有规则形状的磁性物体(柱体、球体及旋转椭球体) 在均匀外磁场中的磁化问题的方法,即分离变量法。通过分离变量法来直接求解拉普拉斯方程边值问题,首先通过给定的边界情况,选取适当的坐标系,并写出该坐标系中拉普拉斯方程的表达式;其次应用分离变量法得出拉普拉斯方程式的通解解析式;最后根据给定的边界条件定出通解中的待定系数,从而得到待求函数的具体解析表达式。
本文需要计算铁质空心球体在均匀外磁场中理论磁场大小,首先应建立球体坐标系,如图 1所示,空心球体的外半径为a,内半径为b,其余空间介质为空气。取球心为坐标原点,地磁场方向沿z轴方向,数值为He,球外区域的标量磁位用φm表示。

|
| 图 1 空心球体模型 |
拉普拉斯方程在球坐标系中的展开式为
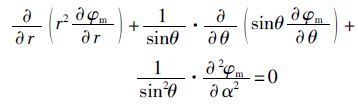 |
(1) |
式中:r——球坐标系中的半径;
θ——仰角;
α——方位角。
然后通过分离变量法对式(1) 求解,可以得到球外区域的通解,将无限远处的边界条件带入通解中可以得到球外区域的标量磁位:
 |
(2) |
 |
(3) |
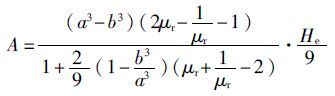
其中μr为球体的相对磁导率,A为常数。
通过式(2) 和式(3) ,可以得到被磁化的空心球体在其周围空间产生的附加磁场,如下式所示:
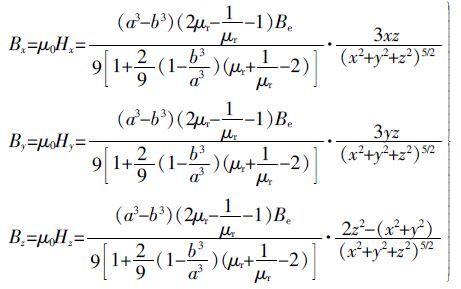 |
(4) |
式中Be=μ0He,各磁感应强度分量与Be的单位相同,总量
使用COMSOL Multiphysics软件对铁质空心球体进行仿真[8]。本模型采用COMSOL中的“磁场,无电流”物理场,求解球体在静态时的磁场分布。其外部条件采用默认值,即温度T=293.15 K,绝对压力PA=1atm(1atm=100 kPa) 。静磁场中没有电流存在,可由磁屏蔽的方法来解决壳体物体的磁场问题,即:
 |
(5) |
式中:B1——壳体内磁场;
B2——壳体外磁场;
Vm——磁标量势;
∇t——切向梯度;
ds——薄壳厚度。
构建一个半径为5 m的球体和一个半径为40 m的球形几何模型,球体的材料为铁,几何模型材料为空气,用来模拟空心球体所处的外界环境。背景磁场与图 1中He方向一致,大小为-50 000 nT。内部空心球体则选用磁屏蔽设定,相对磁导率设为700,表面厚度设为0.05 m,完成网格划分后进行计算。图 2为求解后球体的磁通密度模。

|
| 图 2 空心球体的磁通密度模分布图 |
图中选取了空心球体z方向的一个中心切面,可以看出,空心球体磁通密度模随着颜色由红到蓝,数值由大到小。而且球体内部与外部磁场的分布比较均匀。
为了验证COMSOL Multiphysics软件“磁场,无电流”模块中磁屏蔽方法解决薄壳物体磁场方法的准确性,在球体上方取一直线,为了计算方便,只取磁感应强度的x分量Bx和总量Bt进行验证。首先根据式(4) 中磁感应强度的x分量,得到此分量随距离的变化曲线,如图 3所示。然后在COMSOL软件中将外围空气域的半径大小设置为40,65,90 m,可以得到不同半径空气域对磁感应强度x分量的影响,如图 4所示。

|
| 图 3 空心球体磁感应强度x分量理论曲线图 |

|
| 图 4 空心球体磁感应强度x分量仿真曲线图 |
同理可以得到磁感应强度总量Bt的理论曲线图和相同条件下磁感应强度总量的仿真曲线图,如图 5和图 6所示。

|
| 图 5 空心球体磁感应强度总量理论曲线图 |

|
| 图 6 空心球体磁感应强度总量仿真曲线图 |
通过图 4和图 6可以看出,随着外围空气域半径大小变化,磁感应强度的x分量、总量大小和变化趋势基本保持不变。通过观察和对比图 3、图 4和图 5、图 6,得到空心球体的理论值与仿真值的变化趋势及大小保持一致,相对误差优于1%,也就验证了在解决薄壳物体磁场问题时采用磁屏蔽仿真方法的准确性。
2 复杂物体模型的磁场分布 2.1 单潜艇模型仿真产生的磁场分析从磁性来源分,潜艇磁场可分为恒定磁场和感应磁场。其中,恒定磁场是最主要的干扰磁场,是钢质艇体存在的固有磁场[9],可以定期进行消磁来降低。感应磁场主要来源于艇体钢材和艇用铁磁设备的磁性,取决于艇体和铁磁材料的磁特性和外磁场的磁化。故潜艇周围的感应磁场是潜艇磁场计算和仿真的重点。
本文采用COMSOL Multiphysics软件对潜艇模型进行仿真。与空心球体仿真方法类似,物理场仍然选择“磁场,无电流”模块,求解潜艇模型在静态时的磁场分布。其外部条件和空心球体相同,由于潜艇同属于薄壳物体,采用上文已验证的磁屏蔽方法来解决潜艇的磁场问题。
潜艇几何模型的创建可以选用圆柱体来近似代替,其与空心球体建模步骤不同的是将外部的空气域球体换成450 m×300 m×350 m的长方体,其他设置均一致。图 7为潜艇磁场在正上方400 m处的分布图。

|
| 图 7 400 m处潜艇磁场分布图 |
图中选取了潜艇z方向正上方400 m处的一个磁场切面分布图,可以看出,潜艇磁场从中间往两边逐渐减小,对称且均匀分布。在切面中间沿x方向取一条300 m长直线,可以得到该直线下清晰的潜艇磁场的大小分布,如图 8所示。

|
| 图 8 400m 处潜艇磁感应强度曲线图 |
通过图 8可以看出,在400 m处的潜艇磁场大小变化和图 7中的潜艇磁场分布保持一致,而且磁场数量级为nT级,并可以被实际应用中的磁传感器所测量。
通常改变磁导率大小和切面距离潜艇的高度可以改变潜艇的磁感应强度,相对磁导率为300,500,700时潜艇磁感应强度如图 9所示,探测高度为600,800,1 000 m时潜艇磁感应强度如图 10所示。

|
| 图 9 600m 处磁导率变化时潜艇磁感应强度曲线图 |

|
| 图 10 磁导率为 300袁高度变化时潜艇磁感应强度曲线图 |
由图可知,在探测高度不变的情况下,潜艇的磁感应强度随磁导率的增加而增加;在磁导率不变的情况下,潜艇的磁感应强度随探测高度的增加而减小。而且在1 000 m处的磁感应强度最大只有0.02 nT,所以选取合适的探测高度对潜艇的目标探测具有重大意义。
2.2 飞机和潜艇磁场仿真分析航空磁探是通过测量磁性物质在地磁场中迭加产生的异常磁场来探测目标的。一般由磁性目标产生的磁异常信号十分微弱,如距离中型潜艇300 m的上空,它所产生的磁异常仅有0.5~1 nT,是地磁场的几万分之一[10]。由于航空磁异常探潜系统被动工作并且随着搭载飞机平台运动,因此影响其探测宽度的因素不仅仅是设备检测能力,还包括环境噪声条件、目标特性和地磁环境[11]。
本文在航空磁探测的基础上,使用COMSOL Multiphysics软件对潜艇磁场进行模拟仿真。仿真思路是在同一坐标系下建立飞机和潜艇几何模型,采用离散化取点的方式实现飞机在潜艇上方飞行,数据采集点设置在飞机下方,移动过程中采集点和飞机的相对位置保持不变,得到各点的磁场大小并对其进行分析验证。
首先建立飞机模型,如图 11所示,潜艇模型继续采用上节中的圆柱模型,飞机在潜艇上方180 m处,在飞机外部加一个22 m×7 m×500 m的空气层,目的是提高采集数据精度,其他设置不变,如图 12所示。

|
| 图 11 飞机几何模型图(单位:m) |

|
| 图 12 飞机和潜艇相对位置图(单位:m) |
其次采用离散化的方式来实现在同一坐标系下飞机移动采集潜艇磁场数据:在计算过程中加入参数化扫描,参数为飞机每次移动距离,设为2 m,得到每次采集的潜艇磁场,将点图数据与单潜艇模式下的磁场数据对比,如图 13所示。

|
| 图 13 点数据与单潜艇磁场数据对比图 |
通过离散化的方式实现在同一坐标系下飞机移动采集潜艇磁场,离散数据点采集的点数据与单潜艇的磁场大小以及趋势变化均基本一致,相似度达95%。
3 结束语本文通过对潜艇磁场的理论及方法分析,提出基于COMSOL Multiphysics有限元软件的磁场仿真方法来计算薄壳类磁性目标的磁场。首先对单潜艇模型进行仿真,得到潜艇磁场与潜艇的相对磁导率以及探测高度有关,且400 m处磁场量级为nT级;然后采用离散取点的仿真方法对探测飞行模型进行仿真,实现了多目标模型在同一坐标系下的磁场仿真,为进一步模拟磁目标探测数据源奠定了基础。下一步的工作重点是考虑飞机姿态变化下的飞机磁场仿真,开展对飞机干扰磁场补偿的研究,进一步研究飞机干扰磁场对磁目标探测的影响。
| [1] | 王扬婧. 水下大型目标的磁探测研究[D]. 西安:西安电子科技大学,2012. |
| [2] | 伍东凌, 石超, 王秀. 潜艇磁异常信号与方位对应关系的研究[J]. 舰船电子工程, 2012, 32 (9) : 56 –58. |
| [3] | 陈谨飞. 基于梯度计量的磁异常目标定位方法研究[D].长沙:国防科学技术大学,2012. |
| [4] | 王光源, 马海洋, 章尧卿. 航空磁探仪探测目标磁梯度定位方法[J]. 兵工自动化, 2011, 30 (1) : 32 –34. |
| [5] | 汪晓雨, 刘忠乐. 基于小型运动载体的潜艇磁诱饵磁场产生方法[J]. 水雷战与舰船防护, 2006, 16 (4) : 18 –21. |
| [6] | 孙权, 唐劲飞. 潜艇磁场的估算与仿真[J]. 鱼雷技术, 2011, 19 (4) : 318 –320. |
| [7] | 周耀忠, 张国友. 舰船磁场分析计算[M]. 北京: 国防工业出版社, 2004 : 131 -135. |
| [8] | 刘芊, 曹江勇, 罗勇, 等. 基于COMSOL Multiphysics的磁场仿真分析[J]. 大学物理实验, 2015, 28 (5) : 106 –108. |
| [9] | 张琦, 潘孟春, 陈棣湘. 潜艇磁化场的有限元方法研究[J]. 舰船科学技术, 2009, 31 (1) : 75 –78. |
| [10] | 邓鹏, 张坚, 林春生. 航空磁探中水下目标的自适应探测方法[J]. 舰船科学技术, 2012, 34 (3) : 76 –79. |
| [11] | 扬日杰, 熊雄, 郭新奇. 基于潜艇磁偶极子模型的航空磁探潜探测宽度模型与仿真[J]. 兵工学报, 2014, 35 (9) : 1459 –1465. |